Untuk pilot yang baru memulai merakit tentu ingin menambahkan GPS, karena dapat dimanfaat untuk beberapa hal pada drove FPV diantaranya mengetahui jarak drone dari pilot, kecepatan drone dan yang terpenting adalah berguna untuk melakukan RTH (Return to Home) jika terjadi putus signal (RX Lost) atau pilot mengaktifkan fungsi RTH secara manual karena sesuatu hal seperti VTX / Camera tidak bekerja normal dsb.
Disini penulis tidak membahas lagi teori GPS dan Jenisnya silakan baca tulisan sebelumnya di pengenalan komponen drone rakitan FPV pada tulisan pertama : https://pilotradi.com/index.php/2025/02/28/rakit-drone-dari-nol-hingga-terbang/#gps
Berikut beberapa hal yang perlu diketahui pada GPS :
- Pilih GPS sesuai saran pada FC dan tentu sesuai kebutuhan anda dari segi ukuran (mini atau nano) dan dari segi fungsi (Pakai Kompas atau tidak)
- Masih tersisa 1 (satu) UART yang free pada FC khusus untuk GPS kompas harus tersedia pada DTA dan DCL pada FC sebab untuk kumpas jalurnya tidak bersifat universal tetapi private function
- Tentukan letak GPS untuk menghindari resonansi dengan VTX atau Receiver (baik body, antena dan kabel2nya)
- Harga disesuaikan kondisi keuangan (budget) anda cukup bedakan dari protocol GPS misal: M8 lebih murah dari M10.
Cara memasang sebagai berikut:
Perhatikan wiring GPS pada FC dibawah ini penulis menggunakan FC Velox F7 SE dan GPS NewBeeDrone M10Q,
Wiring Velox FC F7 SE 50A 32bit
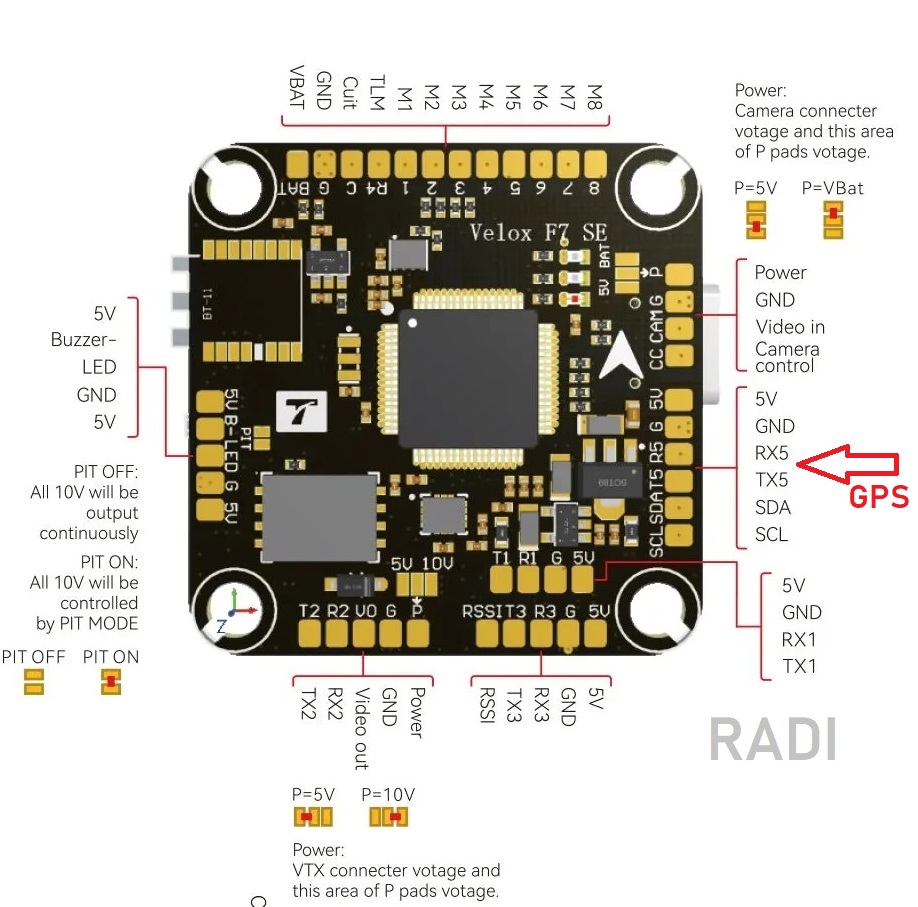
Di Solder dengan ketentuan sebagai berikut:
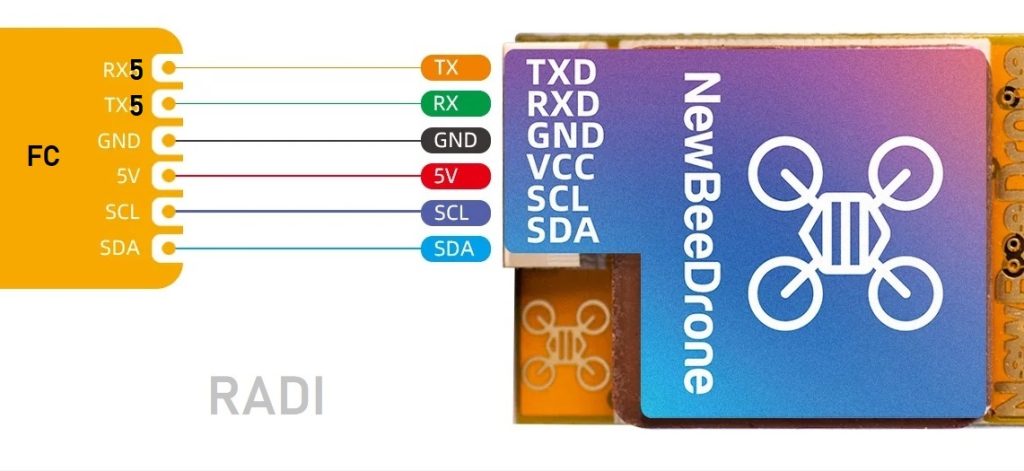
- Kabel TX pada GPS di solder ke RX5 pada FC ( TX ke RX)
- Kabel RX pada GPS di solder ke TX5 pada FC ( RX ke TX)
- VCC / 5V (volt) pada GPS di solder ke 5V pada FC
- GND (ground) pada GPS di solder ke GND pada FC
- SCL (pin lock) pada GPS di solder ke SCL pada FC, pada beberapa GPS CSL biasa dilabeli DCL
- SDA (pin data) pada GPS di solder ke SDA pada FC, pada beberapa GPS SDA biasa dilabeli DTA
Pada Wiring GPS seperti dibawah ini
Ingat untuk meletakkan GPS dan bungkus kabel GPS dengan kertas anti arus yang disertakan untuk hindari resonansi frequensi dengan komponen-komponen yang disebutkan diatas, Paling aman letakkan GPS di ARM bagian depan kiri atau kanan atau pada bagian atas Modul Camera di depan:
Selanjutnya buka Aplikasi Betaflight configurator dan perhatikan hal-hal yang harus disetup sbb:
1. Menu Port seperti dibawah ini:
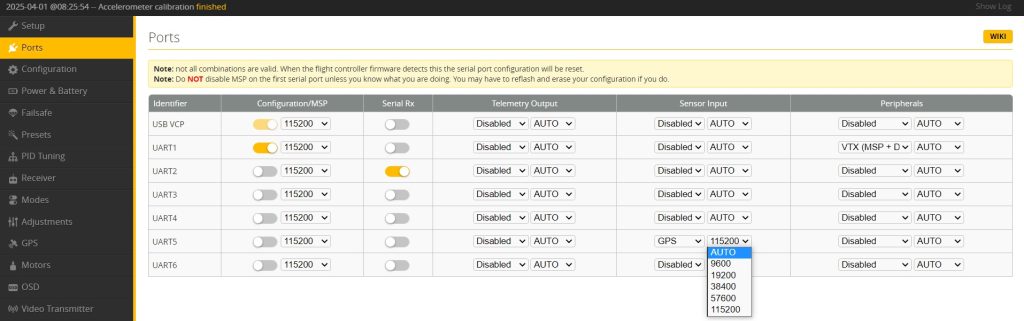
Karena GPS di solder pada UART 5 (TX5 dan RX5) untuk GPS dengan Protocol M10 Speed data di 115200bit/Secon, jangan gunakan default
2. Menu Configuration
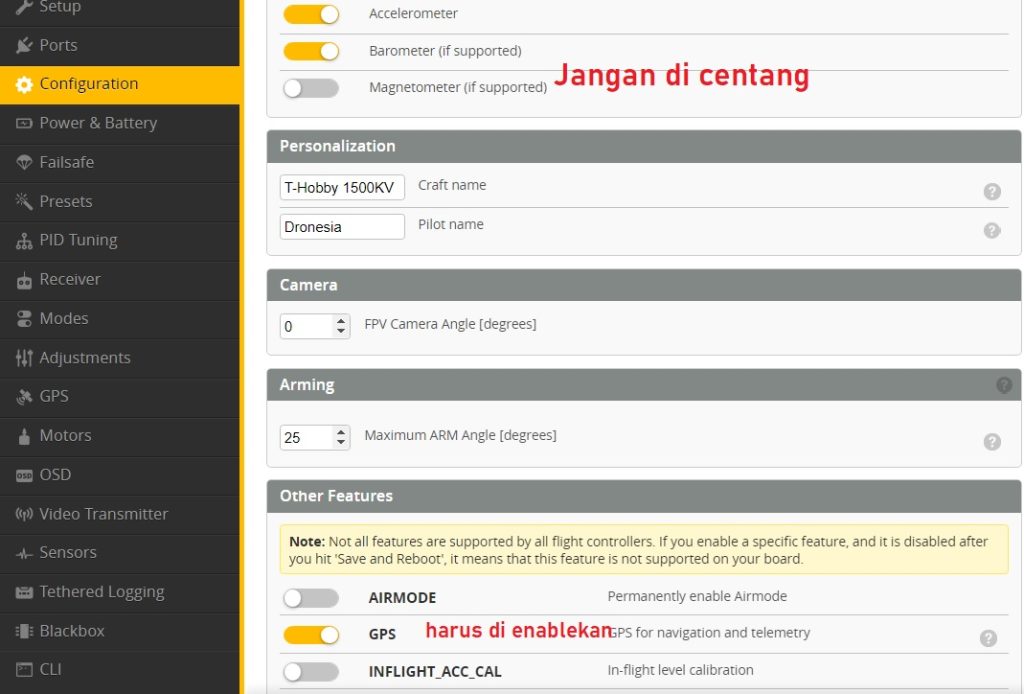
Magno Meter tahap ini tidak usah di aktifkan meski kita memasang GPS dengan Magnotometer (Ada bahasan lanjutan), Enabledkan GPS pada sesi Other Features
3. Aktifkan / Enable Expert Mode agar menu Failsave bisa ditampilkan

4. FailSave setup beberapa item seperti dibawah ini:
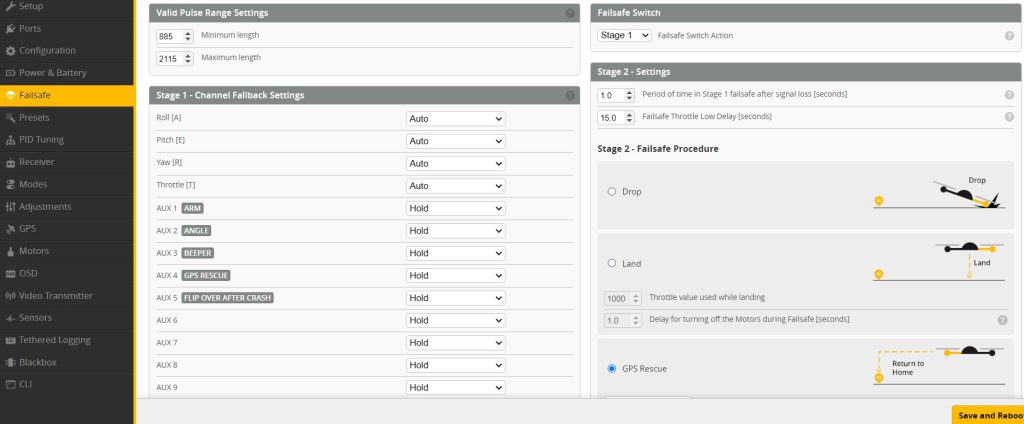
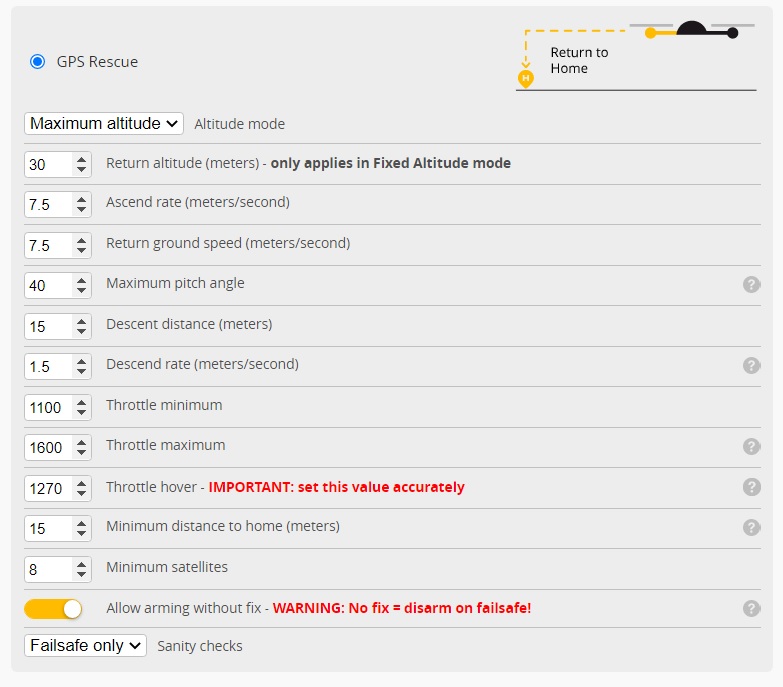
Nilai pada Throttle hover dan Maximum Pitch angle akan menyebabkan sebuah drone saat pulang akan berjalan mulus atau ter angguk-angguk, silakan di ubah-ubah variable Throttle hover sesudah menetapkan sudut picth maksimal.
5. CLI (command Line Instruction) berguna untuk mengatur bebrapa nilai diantaranya, Jarak terdekat untuk aktifkan mode GPS saat uji coba dan menonaktifkan Magnotometer (Kompas) saat RTH, Caranya klik CLI, lalu ketik seperti dibawah ini:
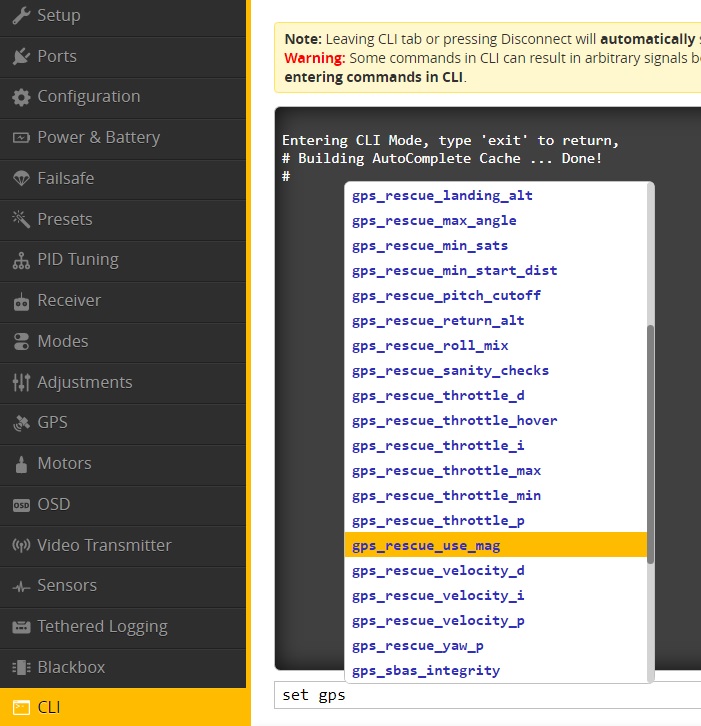
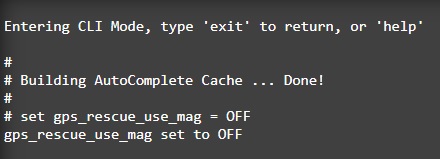
Ketik Save, dan kita sudah bisa uji terbang lihat video dibawah ini…
Catatan:
RTH (Return to Home) hakekatnya pada drone rakitan FPV tidak seperti fungsi RTH pada drone areial, kembali ketempat semula dalam radius 1-2m dari titil terbang, tetapi RTH yang dimaksud adalah bagaimana drone bisa bergerak mendekat ke arah pilot sembari pilot jika memungkinan mengambil alih kontrol drone dengan cara menggerakan pelan-pelan throttle mendekat nilai throttle saat Lost , delay stick Failsave Throttle Low Delay (milisecond) defaultnya adalah 25 ms dan setingan dalam pembahasan ini adalah 15ms.
Berikut Video hasil belajar 1:
Video ketika parameter RTH sudah tepat Balik dan landingnya mulus serta dalam radius 1 meter dari takeoff
https://youtu.be/cJGdj37tQjA
Selamat mencoba…. silakan komen atau bertanya jika ada yang dianggap kurang jelas
![]()