1. Rakit Frame
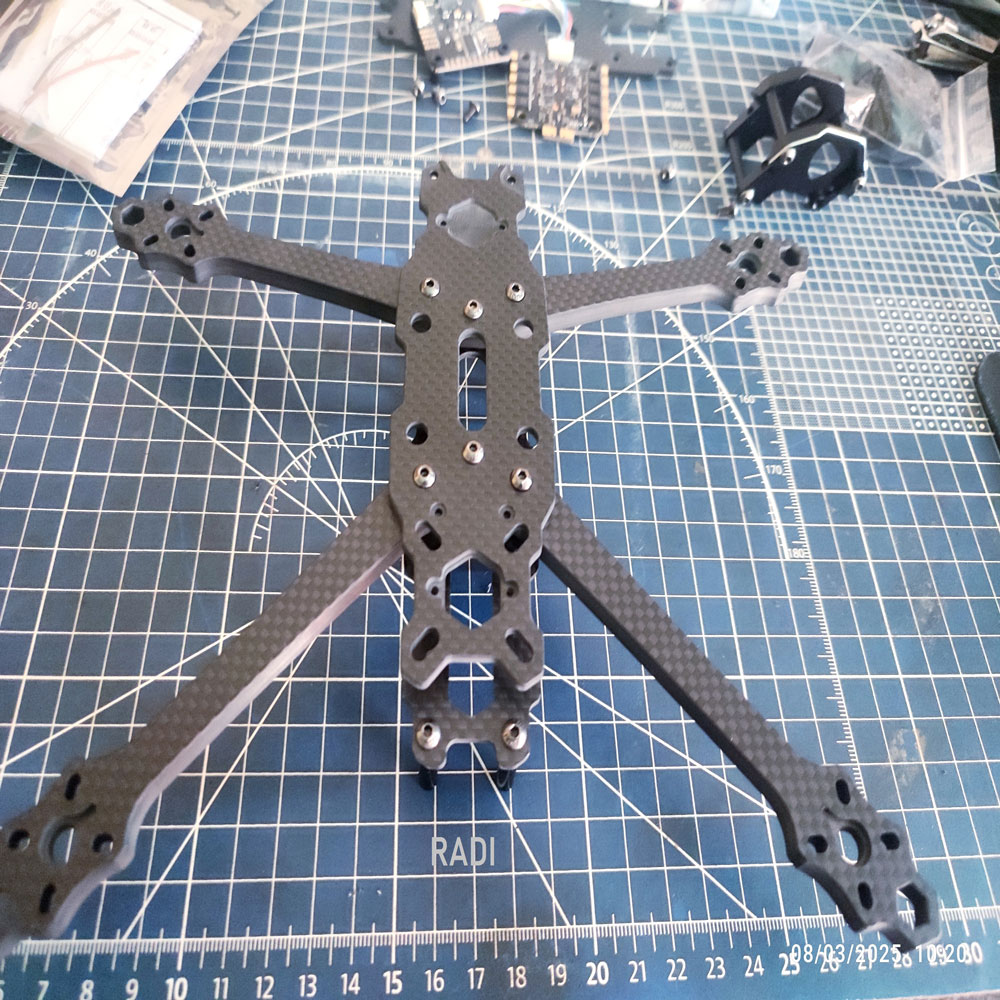
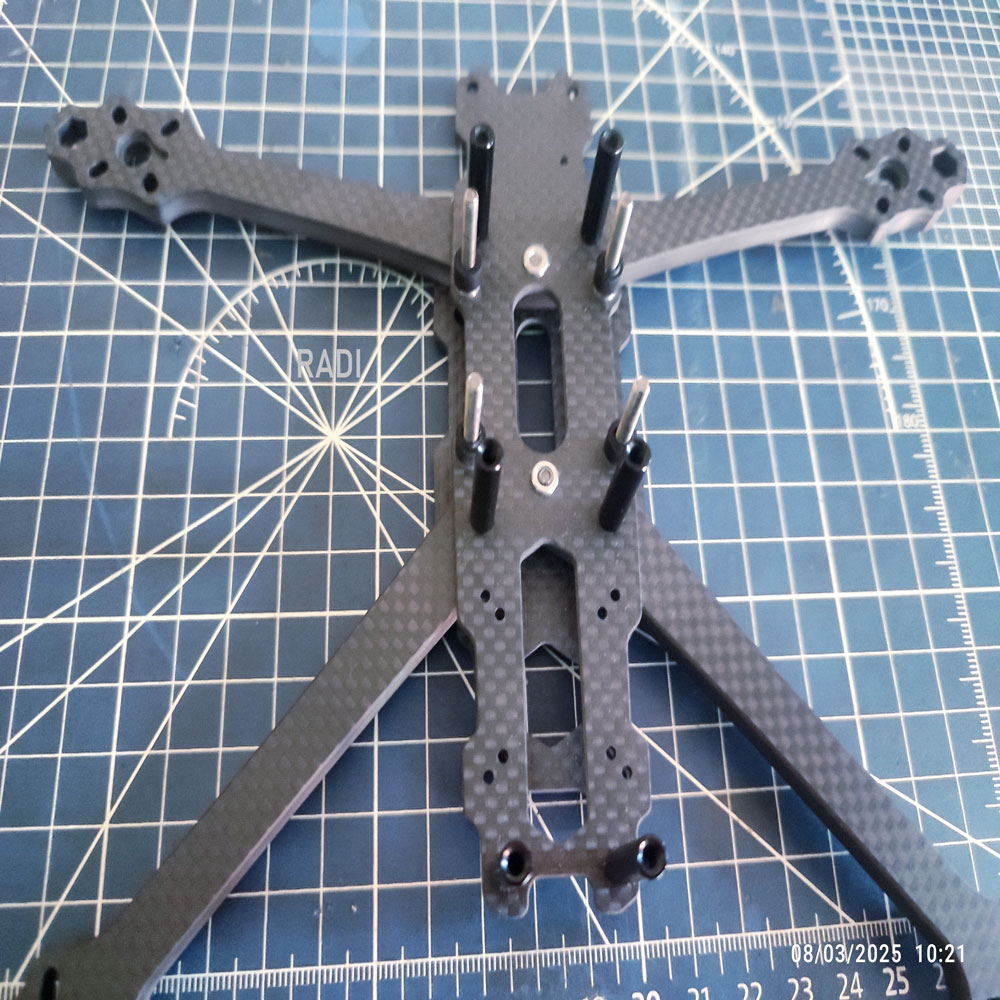
Dimulai dari merakit Frame sehingga berbentuk drone, seperti dijelaskan sebelumnya bahwa tahapan awal merakit frame dimulai daring memasang arm atau lengan drone pada plat bagian bawah (bottom flat), mengunci dengan tiang seperti tampilan dibawah ini,

2. Memasang Motor pada arm
Proses ini tergolong mudah cukup menggunakan baut yang tersedia pada kotak motor, jika anda memiliki pengaman arm maka gunakan baut yang lebih panjang, baut biasanya disertakan dalam dua jenis panjang dan pendek seperti pada gambar fram yang sudah terpasang motor, gunakan kabel ties untuk merapikan kabel motor

Kabel motor terdiri atas tiga kabel seperti sudah dijelaskan sebelumnya anda bisa menyolderynya pada pada ESC dengan terlebih dahul memasang ESC pada frame seperti pada gambar dibawah ini
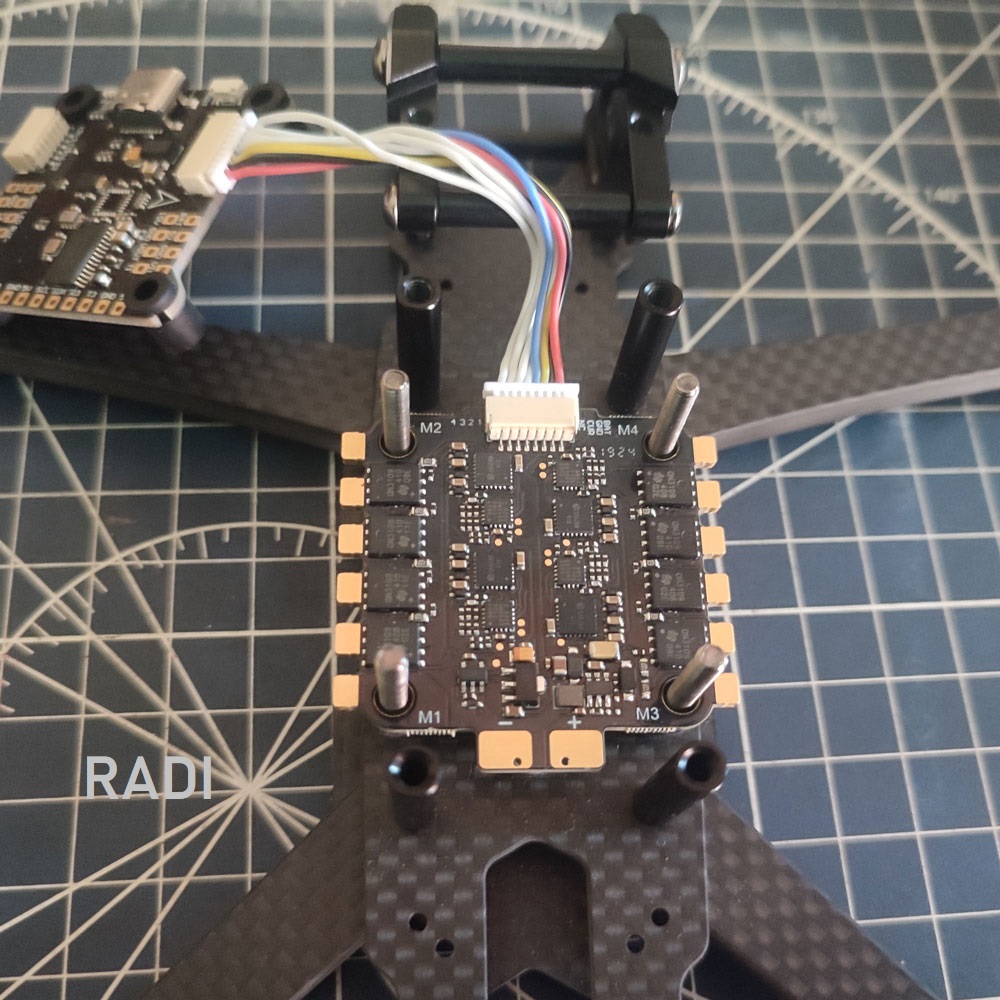
ESC yang terpasang terpasang terbalik, ada harus membalik ESC ini sehingga M1 (Motor 1 berada pasa posisi M3), M1 pada betaflight selalu dimulai dari kanan belakang, tetapi jika posisi motor bisa diatur kemudian melalui betaflight katakanlah posisi seperti M1 di kiri belakang secara fisik namun seara software dapat di swift ditukar posisi dengan M3 dst. Motor 2 (M2) pada Kanan depan sejajar M1, dan M3 pada bagian kiri belakang. setelah itu di solder seperti pada gambar dibawah ini:

Bagi yang masih kurang jelas silakan nonton video pendeknya disini : https://youtu.be/ecpM4OGpsXA?si=YAs7CjPA_MUp9iVG
Selanjutynya pada video ini : https://youtu.be/vJckUFXM8ys
Mamasang Elco yang benar jangan terbalik antara Plus dan Negatifnya, begini cara menentukannya: https://youtu.be/kAP6uZzI-l4
3. Pengujian Solder dengan Smoke Stopper pada FC dan ESC
Setelah Kabel motor dan kabel batrey disolder bersama elconya anda perlu menguji apakah solder anda sudah benar atau ada yang short dengan mencolok battrey hingga FC melakukan booting, nama batterey harus melewati alat anti short yang bernama Smoke Stopper, berfungsi mencegah arus masuk jika terdapat short pada solderan anda., lihat videonya. https://youtu.be/pycCt7VnBRI?si=BMrvHvt0AnhF4-1E
4. Solder Receiver pada FC dan PengetesannyaSesuai fungsinya
Sesuai fungsi untuk meneruskan signal yang diterima dan Remote Control maka Reciver (RX) itu harus di solder pada FC, RX yang digunakan dalam pembahasan ini adalah berjenis ELRS dengan merek Jumper AION 2.4GHz , (Lihat pembahasan sebelumnya), kabel TX RX disolder pada UART 3
Perhatikan 2 video pendek berikut ini sebagai penjelasan singkat dan penyolderan RX agar tidak keliru:
ELRS RX https://youtu.be/kCSKf62hiUE?si=sTGLkE9a139QTw4P
Solder di FC https://youtu.be/ysrqtEWWNDs
5. SETUP PADA BETAFLIGHT dan TEST ARMING
Tahap awal adalah membinding TX dan RX yang digunakan, adapun caranya adalah sbb:
Sesudah membuat profile pada Remote dan Modul sudah terpasang, jangan lupa Protocol yang digunakan adalah CSFR (Cross fire) ini yang mendasar, selanjutnya pada menu Bind tekan tombol bind di Remote biarkan saja berbunyi beep menerus, lalu colokkan battrey dan tekan tombol bind pada receiver dekat antenna sekitar 3 detik, saat proses bind RX akan berkedip cepat karena update firware dan Remote, jika sudah berwarna solid hijau dan Remote sudah tidak bersuara beep berarti proses bind sedah selesai jangan lupa lepas battrey agar drone tidak kepanasan. Cara ini berlaku sama pada TX RX Crossfire seperti TBS
Selanjutnya buka betaflight drone dan remote teap on seperti tadi, perhatikan video dibawa ini:
Setup Receiver https://youtu.be/f-ZoTb1P_hw
Test Arming https://youtu.be/3VCxkK6Ai1s?si=DVhoWUBSz3P6zh0E
![]()