Halo Pilot? anda apakah sudah tidak sabar untuk merakit drone impian anda?
Berikut mimin akan bahas tuntas rakit drone analog maupun digital dari yang tidak kenal komponennya hingga mengetahui fungsi dan merakit atau mengsolder komponen tersebut dalam bahasan ini.
Daftar isi
- Frame Drone
- Motor Drone
- Propeller Drone
- Flight Control (FC) Dan ESC Drone
- Wiring Diagram FC
- RECEIVER DAN REMOTE CONTROL
- GPS (Global Position System)
- LED dan BUZZER
- etc
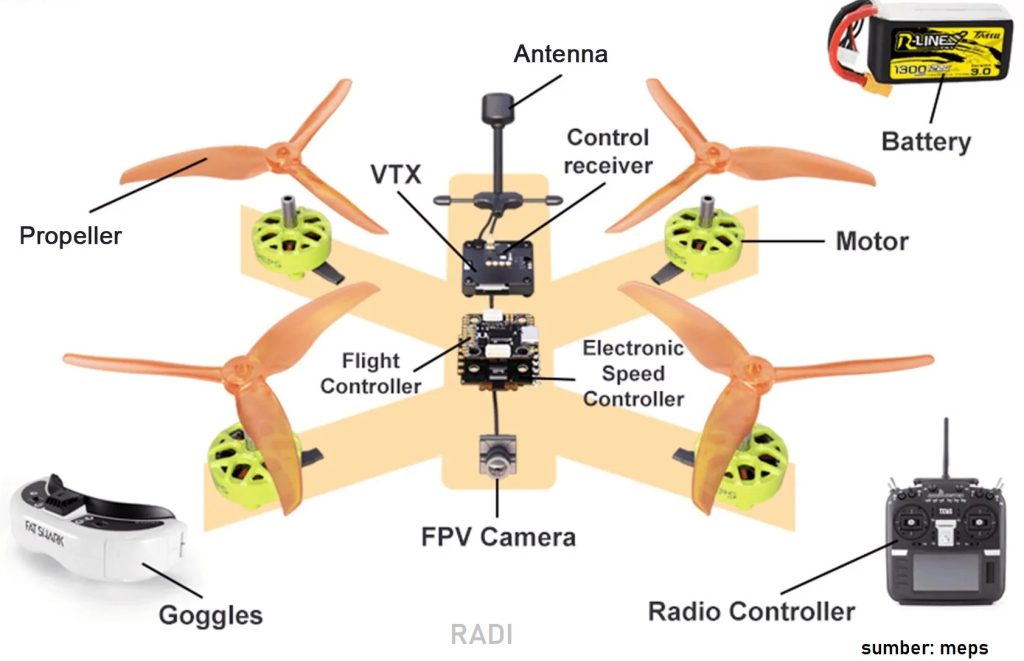
Apa saja komponen drone yang diperlukan untuk merakit drone? perhatikan gambar dibawah ini:
FRAME (Bingkai)
Dari gambar diatas Frame atau rangka drone adalah tempat komponen drone diletakkan seperti ESC, FC, motor, VTX, FPV Camera dsb, frame terbuat dari bahan material serat karbon yang ringan namun cukup kuat menahan berat komponen tekanan angin dan getaran. Frame drone FPV merupakan struktur utama yang menentukan ukuran dan bentuk drone misalkan drone 3inch , 5inch dsb. Frame drone FPV terdiri dari berbagai tipe antara lain seperti:
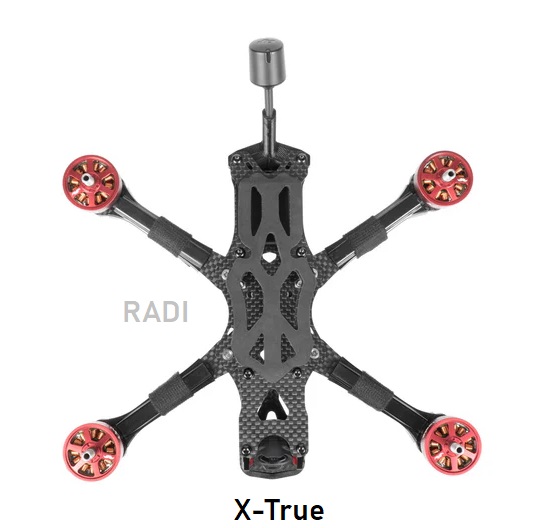
- X-frame (Xtrue berbentuk huruf X) sering dipakai untuk drone Race, Freestyle karena bentuknya X titik pusat ada di tengah memungkinkan drone mudah bergerak dengan lincah .
- X-Wide X yang lebar lengannya direntangkan ke luar ke samping. Geometri X lebar lebih umum pada bingkai gaya bebas, hal ini karena lebih banyak ruang sentral sering kali diperlukan untuk memasang kamera aksi dan baterai di atas bingkai.
- Strecth X adalah X lebar yang diputar. Peregangan X biasanya disukai oleh pembalap yang mencari stabilitas lebih pada sumbu pitch, yang dapat meningkatkan kontrol saat quadcopter melaju dengan kecepatan tinggi.
- DC (DeatCat) memiliki bentuk susunan lengan yang asimetris, dengan lengan depan yang lebih jauh keluar dan ke belakang sehingga propeller tidak terlihat pada OSD atau tertangkap Video Camera, Umumnya digunakan untuk drone Cinematik, Longrange dan juga Freestyle.
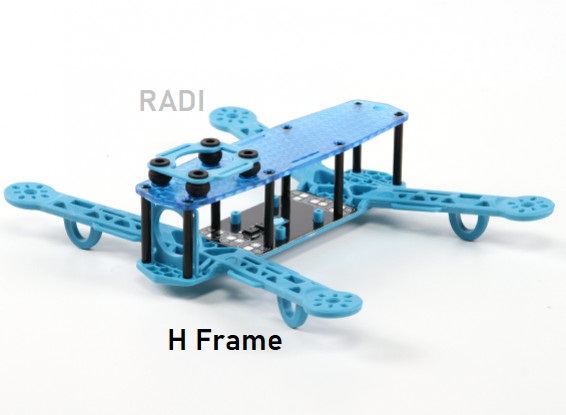
- H-frame (berbentuk huruf H) adalah gaya desain quadcopter kuno lainnya. Dalam quad H, lengan diposisikan di depan gerbong gaya “bus” yang panjang. dewasa ini , H quad tidak lagi disukai karena ukurannya yang besar dan konfigurasinya yang canggung contoh Frame DJI FPV pertama.
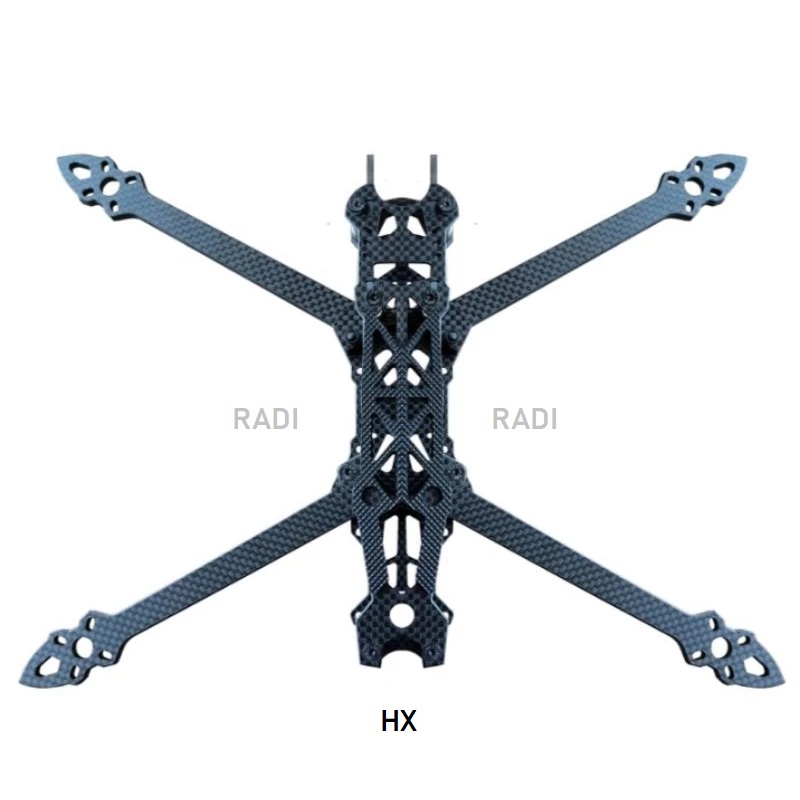
- HX adalah varian baru dari H. merupakan penggabungan H dan X dimana H adalalah lengan (arm) dan lengan belakang mengikut lengan model X, diterapkan konfigurasi true X, wide X, atau stretch X, paling sering wide atau true X
- A Z quad menggunakan dua pelat dasar serupa yang dipasang di atas satu sama lain untuk menghasilkan geometri berundak antara motor depan dan belakang. Memasang motor pada bidang yang berbeda meningkatkan penanganan prop wash pada quadcopter, karena lebih sedikit turbulensi udara yang diarahkan ke motor belakang selama penerbangan maju
- A Plus Bingkai plus memiliki tapak yang sama dengan bingkai X yang diputar 45°. Bingkai plus dapat dianggap menguntungkan karena setiap motor bertanggung jawab atas gerakan rotasi hanya dalam satu sumbu, yang secara teoritis berarti kontrol yang lebih baik dapat dilakukan. Meskipun demikian, rangka plus lebih rentan patah karena sebagian besar benturan melibatkan pukulan kuat pada lengan depan saja
- Vertical Arm (Lengan berdiri) Lengan vertikal memutar orientasi lengan untuk menghasilkan luas permukaan sekecil mungkin untuk meminimalkan hambatan. Daya tahan biasanya tidak dikompromikan karena lengan masih dapat mempertahankan lebarnya, namun konstruksi rangka seringkali lebih rumit daripada rangka horizontal standar.
Pemasangan baterai atas atau bawah bersifat subyektif, dan pilot yang berbeda biasanya lebih memilih satu metode daripada metode lainnya. Kebanyakan rangka balap hanya cocok untuk baterai yang dipasang di bawah, karena memungkinkan rangka dirancang sekompak dan seringan mungkin. Sementara frame (bingkai) Freestyle (gaya bebas) biasanya dirancang dengan mempertimbangkan baterai yang dipasang di atas, dilengkapi dudukan tengah panjang yang dapat mendukung baterai dan kamera aksi untuk merekam rekaman HD
Berikut beberapa foto dari frame diatas

Frame umumnya di kirim dengan buku petunjuk perakitan atau di QR kode pada kertas yang disertakan untuk Download Petunjuk Perakitan rangka tersebut, Dan menjadi kegiatan yang menyenangkan membentuk bagian-bagian frame menjadi sebuah bentuk dasar drone.
Bagian-bagian frame antara lain Arm (lengan), Botton plate (pelat bawah), Top plate , Column (tiang) dsb seperti pada gambar dibawah ini, dan gambar jadi sebuah frame drone balap dari HGRLC.

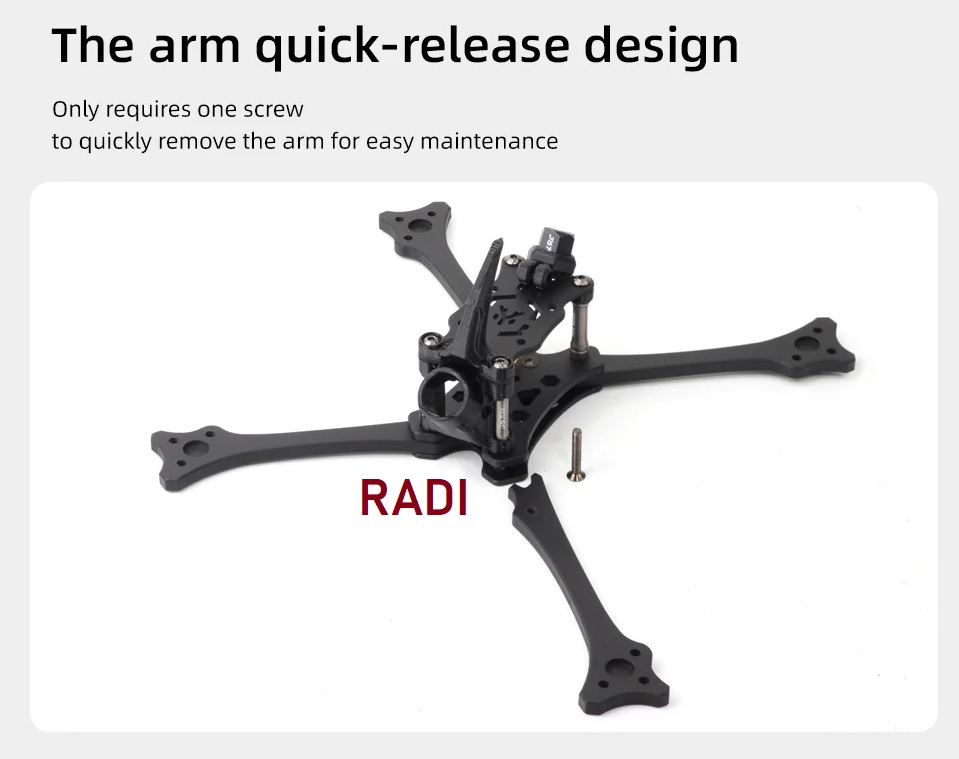
Langkah merakit frame drone umumnya dimulai dengam memasang ke 4 Arm pada Bottom plate dan mengikatnya menggunakan Column (tiang) dan menguncinya dengan kunci utama atau (round head) dan seterusnya ikuti dengan memperhatikan gambar perakitan frame yang disertakan atau di download hingga frame berbentuk drone.
Contoh buku petunjuk perakitan frame mario 5 dari Speedybee, penjelasan bagiannya untuk frame freestyle DC

Jika ingin informasi frame ini bisa klik disini https://pilotradi.com/index.php/produk/speedybee-mario-5-5inch-frame-kit-dc-xh-lite/
MOTOR DRONE
Motor drone adalah komponen yang bertugas untuk memutar baling-baling (propeller) sehingga drone memiliki daya dorong dan bisa terbang atau bergerak cepat, jenis Motor yang umum digunakan pada drone adalah Motor:
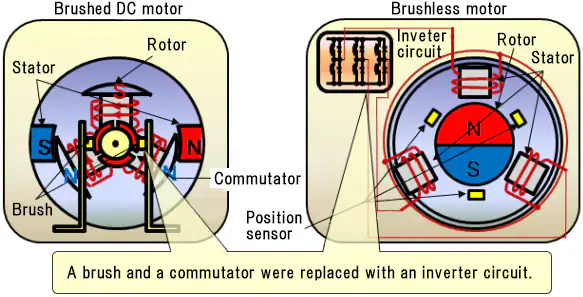
Brushless (tanpa sikat) dan sering disingkat motor BLDC, atau BL, adalah motor listrik yang ditenagai oleh arus searah (DC) yang menonjol karena desainnya yang unik, karena menggunakan arus searah memungkinkan motor aman bergerak dalam air tawar yang tidak menimbulkan mengandung garam, jadi motor drone itu aman dalam air tawar tepai riskan rusak pada air laut / garam. Berikut foto Motor yang diambil dari T-Hobby

Brushed (dengan sikat) adalah motor listrik yang menggunakan sikat untuk mengubah arah arus koil. Motor ini juga dikenal sebagai motor DC yang (disikat) , sikat maksudnya adalah lapisan yang menjaga kontak fisik dan listrik dengan komutator, motor brushed umumnya digunakan drone kecil (micin) dan gampang aus bagian mengalami penyusutan atau kerusakan.

Motor Brushles VS Motor Brushed
Drone umumnya terdiri dari 4 motor sesuai jumlah arm atau lengan drone, meski ada drone yang hanya terdiri dari 2,3 atau 6 motor bahkan drone untuk cinematik canggih yang digunakan mengangkut camera DLSR menggunakan 8 motor yang di susun 2 pada setiap Arm framenya.
Berikut bagian-bagian penting dari sebuah struktur motor atau dinamo drone seperti pada gambar yang kami peroleh dari T-Hobby yang sebelumnya bernama T-Motor, Jenis motor ini adalah Veloc / Velox 2808 terdiri atas 1300KV, 1500KV dan 1950KV, motor sangat populer dipakai untuk terbang jauh (Long Range) dan Cinematik karena senyap dan kuat mengangkut beban yang besar, perhatikan daya dorong (Thurst) pada gambar ke 3
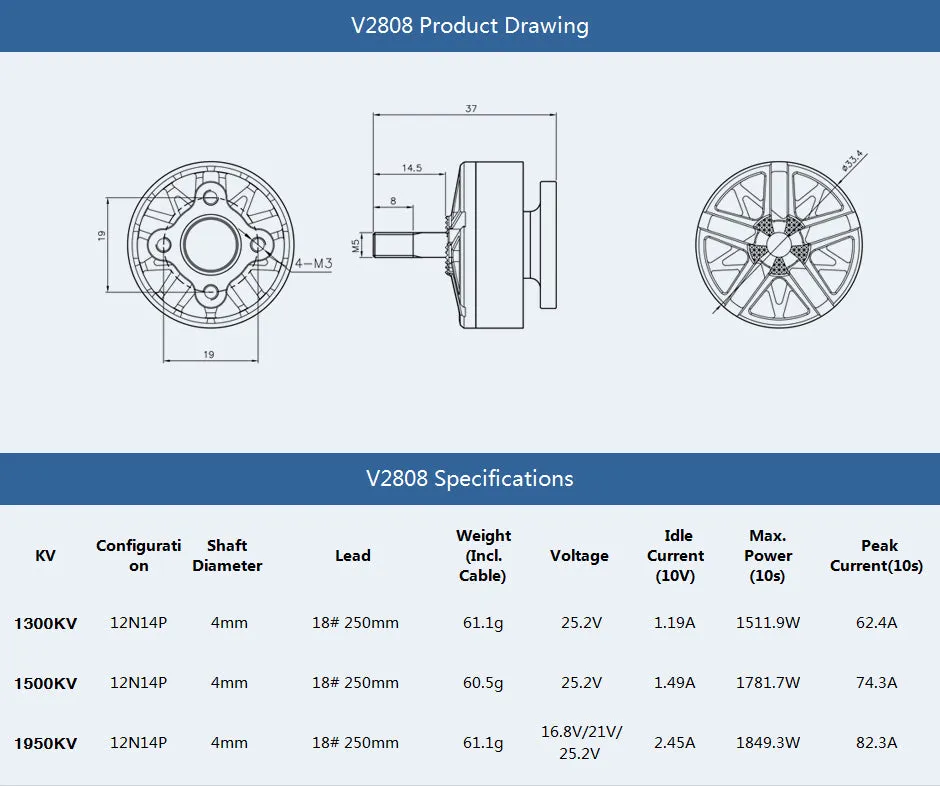
Pada gambar diatas Istilah “KV” adalah singkatan dari “RPM per volt”. Istilah ini menunjukkan berapa banyak putaran per menit (RPM / Round PerMinute) yang akan dicapai motor untuk setiap voltase yang diberikan padanya.
Configuration 12N14P berarti motor tersebut memiliki 12 kutub elektromagnetik di stator dan 14 magnet permanen di rotor. Konfigurasi ini umum digunakan untuk motor drone dan motor brushless out-runner. Motor dengan jumlah kutub yang lebih banyak umumnya berarti kontrol motor yang lebih halus dan lebih presisi, Angka 12 menunjukkan jumlah kutub elektromagnetik di stator. Stator adalah bagian motor yang tidak bergerak, Angka 14 menunjukkan jumlah magnet permanen di rotor. Rotor adalah bagian motor yang berputar, Konfigurasi 12N14P umumnya digunakan untuk aplikasi torsi yang lebih tinggi, Motor dengan konfigurasi 12N14P dikenal karena pengoperasiannya yang halus dan senya
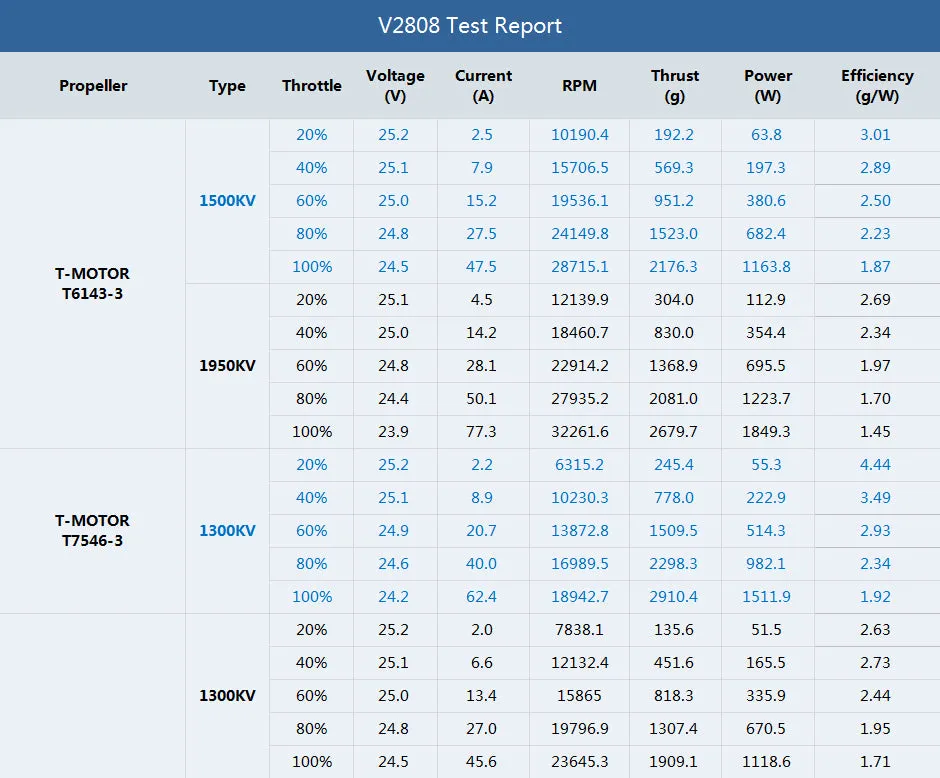
Dari tabel diatas diperoleh jumlah beban yang dapat diangkat oleh drone dikali jumlah motor yang digunakan, misalnya: 1300KV pada Throttle 40% sebesar 778gram bila di kali 4 motor maka 3.112Gram atau 3,1Kilogram, dari sini anda sudah bisa menghitung kebutuhan motor yang tepat digunakan saat merakit drone LongRange. Berbeda jika merakit drone Race tentunya.
Motor DC tanpa sikat (BLDC) biasanya memiliki tiga kabel karena dirancang sebagai sistem tiga fase. Setiap kabel sesuai dengan salah satu dari tiga fase, yang penting untuk pengoperasian motor. Berikut adalah rincian tujuan setiap kabel:
Kabel Daya : Biasanya kabel ini berwarna merah (atau terkadang kuning) pada drone hitam semua terletak pada bagian tepi dan digunakan untuk mengalirkan daya ke motor DC brushless . Kabel ini terhubung ke sumber tegangan positif, seperti baterai atau catu daya, yang menyediakan tegangan utama ke motor.
Kabel Kontrol : Kabel Tengah berfungsi sebagai kontrol atau sinyal. Kabel ini digunakan untuk mengontrol kecepatan dan arah motor dengan bantuan modulasi lebar pulsa (PWM) atau sinyal kontrol lain dari pengontrol kecepatan elektronik (ESC). Kabel ini terhubung ke output kontrol pengontrol motor.
Kabel Biasa atau Kabel Ground : Kabel hitam biasanya berupa kabel biasa atau kabel ground. Kabel ini menyediakan jalur balik untuk arus dengan melengkapi rangkaian dan dihubungkan ke terminal ground dari catu daya. Jika kabel Positif dan negatif tertukas penyolderannya kan merubah arah putaran motor.
Ketepatan memilih motor drone yang digunakan akan sangat berpengaruh pada kenyamanan terbang secara menyeluruh karena drone terasa mudah dikendalikan, tidak bergetar dan tidak panas.
Jika membutuhkan informasi harga motor ini silakan klik :https://pilotradi.com/index.php/produk/t-hobby-velox-v2808-1300kv-1500kv-longrange-drone-7-8inch/
PROPELLER DRONE
Propeller drone terdiri dari bilah-bilah yang berputar untuk menghasilkan dorongan dan angkat yang membuat drone terbang. Propeller juga disebut baling-baling,
‘ Pitch ‘ dapat dengan mudah disalahartikan sebagai sesuatu yang lain. Namun, jika menyangkut drone – istilah ini memiliki implikasi khusus, setidaknya ada 2 hal yang utama sbb:
Sudut : Terutama, ‘pitch’ mengacu pada sudut yang dibuat oleh masing-masing bilah penopang saat sejajar dengan bidangnya.
Parameter Pengukuran : Umumnya diukur dalam inci atau cm, istilah yang relatif rumit ini menjadi lebih mudah setelah Anda menyadari bahwa ‘pitch’ mencakup pertambahan elevasi per putaran atau putaran penuh jika bergerak melalui media padat.
Yang terasa pada propeller dengan ukuran yang sama tetapi berbeda pict Misalkan P5030 dan P5050 , P5030 dengan pitch 3 akan lebih semut tetapi FT berkuran karena daya dorong sedikit berkurang dibanding P5050 (pitch 5).
Contoh Fhoto Propeller dari Gemfan yang jadi propeller idaman penulis dengan drone 7″ selain enak untuk Cinematik diajak freestyle juga oke.

Kesimpulan:
Pemilihan propeller yang tepat sesuai peruntukan motor akan menentukan kenyamanan terbang, misalkan ingin terbang LongRange bila ESC dan Motor mendukung kita bisa menggunakan Pict yang lebar misalnya jenis 5050 pada drone 5inch atau 7050 ada drone 7inc , sementara untuk drone freesyle 5inch propeller 5039 atau 5040 bahkan jika ingin bergerak halus maka 4940 terkadang menjadi solusi drone 5inch
FC DAN ESC DRONE
FC (Flight Control) drone atau pengendali penerbangan drone adalah perangkat keras dan lunak yang mengendalikan penerbangan drone. Pada papan FClah segala komponen untuk keperluan kontrol di pasang (di solder) seperti Receiver (RX) untuk kontrol pengendalian dari Remote Control, atau GPS , VTX dan lain-lain yang akan kita bahas nanti, bahkan pada papan FClah diletakkan MCU (Micro Controller Unit) yang merupakan otak pengendali dari sebuah drone nirawak dan merupakan komponen penting dalam flight controller (FC).
Penjelasan
- MCU adalah chip persegi hitam dengan banyak pin yang memanjang dari tepinya.
- MCU menyimpan kode firmware dan melakukan perhitungan yang rumit.
- Ada beberapa jenis MCU yang digunakan untuk FC, antara lain F1, F3, F4, F7, G4 dan H7.
- Perbedaan utama di antara keduanya adalah kecepatan penghitungan dan ukuran memori.
- MCU mungkin merupakan komponen terbesar pada papan pengendali penerbangan.
FC adalah kumpulan komponen dan sensor yang menjaga drone atau pesawat RC tetap seimbang dan dapat terkendali. FC biasanya dilengkapi dengan gyro dan accelerometer.
Tips memilih FC
Pilih firmware yang menawarkan fungsionalitas, kinerja, dan kustomisasi yang Anda butuhkan.
Pastikan pengendali penerbangan yang Anda pilih sesuai dengan ukuran, berat, daya, dan tujuan drone Anda.
Fungsi pengendali penerbangan drone
- Menstabilkan penerbangan drone agar tetap seimbang (Gyro level)
- Memproses perintah dari kendali jarak jauh atau sistem autopilot
- Menavigasi drone
- Mengontrol motor drone
- Mengomunikasikan data dengan sistem eksternal seperti kamera, muatan, atau modul telemetri
Komponen pengendali penerbangan drone
- Sensor, seperti giroskop, akselerometer, barometer, dan kompas
- Modul GPS
- Perangkat komunikasi
- Stasiun kendali darat (Remote Control)
Jenis pengendali penerbangan drone
Ada berbagai jenis FC dengan berbagai macam bentuk, spesifikasi, dan plus minus masing-masing. Beberapa contoh FC adalah:
- Betaflight F4 / F7 / H7
- T-Motor /T-Hobby F7 FC SE Unlock All
- KISS V2
- Pixhawk PX4
FC yang tepat untuk kasus penggunaan spesifik sangat penting, karena kombinasi papan/firmware yang berbeda akan membuka fitur yang berbeda. Perhatikangambar Wiring Diagram agar anda menjadi perakit drone yang ulung di pembahasan selanjutnya
Contoh Tumpukan FC F7 dengan ESC 32Bit, (bagian bawah adalah ESC yang merupakan tempat kabel Battrey disolder (V+ dan V-) serta kabel motor yang terdiri atas 3 kabel seperti dijelaskan sebelumnya di solder pada ESC pada pad sesuai nomor motor, misalkan pada betaflight, Motor 1 adalah kanan belakang, Nomor 2 adalah Kanan Depan, Motor 3 adalah kiri belakang dan Motor 4 adalah kiri depan.

ESC drone adalah (Electronic Speed Controller) atau Pengendali Kecepatan Elektronik yang mengatur kecepatan dan arah motor drone. ESC berperan penting dalam menentukan pergerakan, stabilitas, dan respons drone.
Fungsi ESC drone
- Mengatur kecepatan, arah, dan daya motor listrik drone
- Menafsirkan perintah dari pengendali penerbangan
- Menyesuaikan kecepatan motor sesuai dengan perintah pengendali penerbangan
- Mengubah tegangan DC menjadi AC dalam tiga fase yang diperlukan oleh motor
- Membantu mengendalikan ketinggian, arah, dan posisi drone
Cara kerja ESC drone
- ESC menghubungkan motor, baterai, dan pengendali penerbangan
- ESC menerjemahkan kendali pilot menjadi instruksi tepat yang dikirim ke motor untuk mengendalikan gerakan
Peringkat arus ESC
- Peringkat arus ESC menunjukkan arus maksimum yang dapat ditangani ESC tanpa kerusakan
- Ada dua peringkat arus untuk ESC: kontinu dan burst
- Peringkat arus kontinu menandakan arus konstan yang dapat ditangani ESC dengan aman
ESC dapat berupa satu tumpukan seperti 4in1 atau 8in1 (4 ESC dalam 1 papan atau 8 ESC dalam 1 papan) atau dapat juga 1 ESC pada satu papan kecil, jadi untuk drone yang memiliki 4 Motor membutuhkan 4 ESC yang dapat berdiri sendiri atau ditumpuk dalam sebuah papan.
ESC dihubungkan ke FC dengan menggunakan kabel kecil yang teridiri 8kabel hingga 10 sesuai kebutuhan komponen yang ada pada ESC seperti Telemetry, Power 5V, Power 9-12V selain VBAT dan Current serta 4 Signal motor atau sejumlah 6 motor.
Efek jika salah memilih ESC untuk drone antara lain:
- Jika ESC kecil dari sisi Ampere, misalkan kita menggunakan Motor 2306 dengan ESC 30A, maka problem yang timbul adalah ESC menjadi panas, motor juga akan terasa kurang bertenaga karen asupllay power dari ESC kurang
- Jika ESC kebesaran secara logika tidak ada masalah tetapi akan terjadi pemborosan biaya , misalnya Drone Inch gunakan ESC 80 atau 100A
- ESC Blheli 32Bit atau BLheliS adalah protocol dalam firmware yang berguna mengatur permintaan dari FC , FC melakukan itu berdasarkan permintaan dari Receiver , Receiver melakukan itu berdasar permintaan pilot dari RC, misalkan Blheli32 itu sudah bisa aktifkan Birectional pada Configurator, Bidirectional pada motor tidak perlu di flash lagi ke BluyJay atau BLHelis32 yang sudah dihentikan dapat menggunakan Firmware AM32 ESC adalah rangkaian bidirectional converter yang berfungsi untuk mengatur aliran daya dalam sistem pengereman regeneratif. Jadi ketika Pilot mengerem secara tibatiba dengan menurunkan Throttle maka power yang tadi sudah berada di ESC daat dikembalikan segera ke Battrey ini akan berguna dan penghematan power.
Pembahasan khusus tentang bagian yang dislolder pada FC dan akan akan dilakukan dibagian lain bahasan Tahapan Merakit.
WIRING DIAGRAM FC
Perhatikan Wiring diagram (Diagram pengkabelan) dari FC yang dibahas diatas, memerlihatkan pada titik mana sebuah komponen lain di solder misalkan jika menggunakan Camera Analog dan jika menggunakan Camera Digital seperti DJI, Vista atau Runcam HD, FC ini termasuk FC yang dual OSD artinya suppor Analog dan Digital, beberapa FC hanya support Digital atau hanya support Analog, pertimbangkan hal sebelum membeli FC
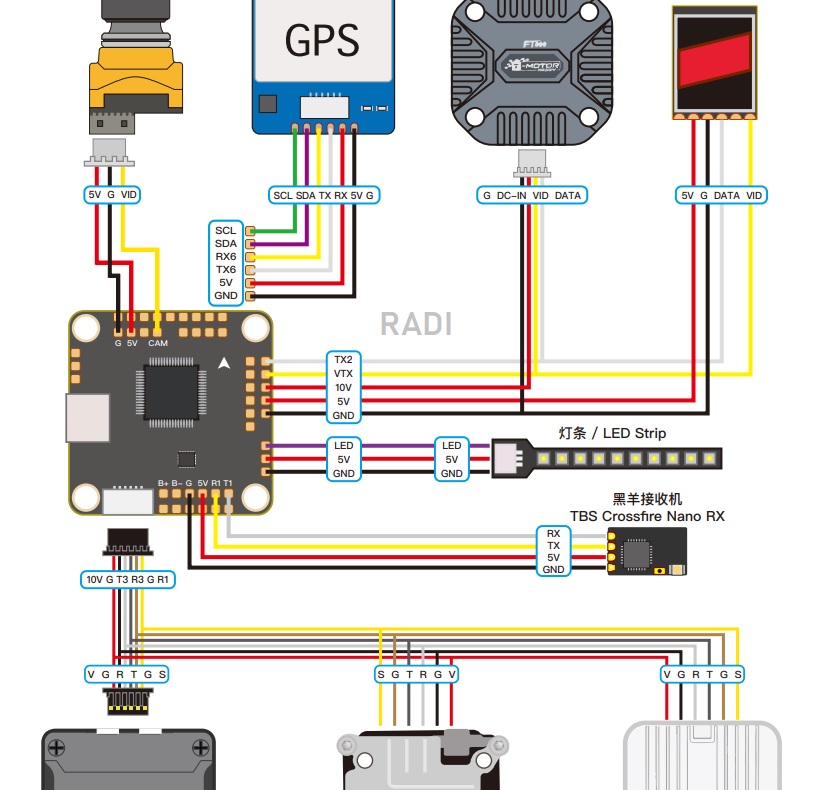
Pada kasus diatas Camera Analog di solder pada bagian depan FC pada pad CAM 5V dan G , sementara Digitalnay karena sudah satu paket dengan VTX pada R1 (rx1), G (ground), R3 (rx3), T3 tx3), G dan 10V. penjelasan hal ini akan Rdilanjutkan kemudian pada bahasan lain.
VTX (Video Transmiter) dan Camera FPV adalah komponen penting pada drone FPV (First Person View) karena ini yang menujukkan arah ke pilot agar drone tidak jatuh atau Crash
- Pemancar video yang berfungsi untuk mengirimkan sinyal audio visual dari kamera ke penerima
- Komponen penting dari sistem FPV (First Person View)
- Biasanya berupa sistem analog atau digital yang mentransmisikan pada pita 5,8 GHz, ada yang 1Ghz-1,3GHz
- VTX dengan kualitas rendah dapat menyebabkan kehilangan sinyal FPV dan drone jatuh
Pada Versi Analog ada TBS , Rushtank, AKK, Matek dsb dan pada versi Digital ada DJI, Wallksnail dan HDZero . Perbedaan kedua jenis VTX ini terletak dapa kualitas Video yang dihasilkan dan delay yang ditimbulkan, Delay ini penting terutama pada Drone Race dimana delay 15ms keatas tidak disarankan karena drone Race membutuhkan gerakan jari atau kontrol yang cepat. Namun pada versi DJI O4 dengan Goggles G3 sudah tersedia versi Race dengan delau 15ms seperti HDZero saat ini.
Sebagian pilot seperti penulis masih setia menggunakan Analog selain kresek-kresek pada layar OSD harga yang relatif lebih murah dibanding yang HD menjadi daya tariknya.
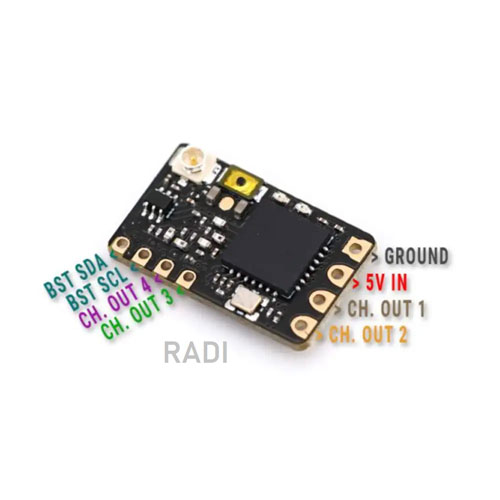
RECEIVER (RX) dan Remote Control
Ini adalah komponen yang bertugas meneruskan perintah dari Remote Control (TX) dan di teruskan ke FC, beberapa jenis Receiver yang umum digunakan berbasis Protocol SBUS, IBUS dan CSFR (Crosfire), beberapa tahun terakhir umumnya sudah menggunakan protocol Crossfire seperti Nano TBS (Team BlackSheep) atau jenis ELRS sepeti Jumper AION 2.4GH. umumnya frequensi yang digunakan Remote Control dan Reciever sebagai penerima adalah 2.4Ghz atau 915Mhz untuk Jarak Jauh, rumusnya adalah semakin rendah frequensi semakin jauh jangkuan (Lamda Frequensi)
Perhatikan gambar dibawah ini Reciver memiliki Antena sejenis frequensinya dan beberapa kabel yang harus di solder setidaknya Channel Out TX dan RX. Ada Tombol Bind agar bisa terkoneksi dengan Remote Control

REMOTE CONTROL (RC) adalah alat untuk mengendalikan drone, keselamatan drone sesungguhnya terletak pada RC jika signal putus dan Drone tidak dilengkapi dengan sistem RTH (Return to Home) maka drone pasti jatuh.
RC harus sesuai dengan Receiver yang digunakan (satu frequnesi) agar bisa terhubung antara TX (Remote ontrol0 sebagai pemancar dan RX (Receiver) sebagai penerima,

GPS (Global Position System)
GPS adalah sistem navigasi dan penentuan posisi berdaya rendah 1-3v. Pada drone alat ini berfungsi untuk menentukan lokasi geografis drone secara real-time dengan akurasi tinggi. GPS drone bekerja menangkap signal yang dipancarkan dan menentukan koordinat lokasinya secara tepat. Posisi drone yang dihadirkan oleh alat ini berdasarkan 2 titik yakni yakni Latitude(garis Lintang) dan longitude (garis Bujur) adalah sistem koordinat yang digunakan untuk menentukan posisi suatu tempat di Bumi

Pada gambar diatas GPS sudah menggunakan kompas sehingga mengetahui arah angin Utara selatan dsb, tetapi pada GPS drone FPV jarang digunakan karena pilot drone hanya perlu mengetahui arah pulang (Arrow Home)
Terdapat 6 kabel jika gunakan kompas yakni 2 terakhir DTA dan DCL sedangkan 4 pertama adalah Power, Ground, TX dan RX, pelajari wiring GPS yang digunakan dan harus di solder terbalik khususnya TX RX, jadi TX pada GPS harus di solder di RX pada FC dan RX pada GPS disolder di TX di FC agar data bisa terkirim dari kedua arah (GPS dan FC)
LED BUZZER
Led adaah semacam lampu yang ditempatkan pada drone agar mudah terlihat juga menjadi sesuatu yang indah pada malam hari baik yang berwarna dan beranimasi maupun led yang hanya warna solid.
Buzer semacam speaker yang bisa mengeluarkan suara yang keras hingga 100db yang berguna untuk melacak keberadaan drone bisa drone terjatuh, LED dan Buzzer biasanya ditempatkan dalam suatu wadah tetapi ada juga LED dan BUZZER yang di letakkan pada papan terpisah, misakan LED panjang dan Cinewhoop dan Buzer aktif yang memilik battrei tersendiri pada drone Longrange.
Wiring LED memiliki sumber power Plus dan Negatif umunya 5V meski untuk led programming bisa 12V. Buzer memiliki Power dan Ground serta Buzeer Min.


Itu komponen yang sebaiknya disediakan untuk merakit meski, GPS, LED Buzzer itu sifatnya optional tetapi battrey diperlukan untuk pengetesan putaran dan test terbang.
Bahasan selanjutnya Kita mulai merakit …. pada tulisan selanjutnya
![]()
5 thoughts on “Rakit Drone FPV dari nol hingga terbang (1)”
Isinya Daging lunak semua ini omhu 😊👍🏽
Ia suhu biar segar2 bacanya sambil tiduran wkwk
Hihihi…gawat, langsung praktikum itu c 🤭
Mantap suhu, ini sangat bermanfaat untuk menambah wawasan, ADAKAH Chanel YouTube juga lah?
ada om semua yg dibahas di rakit akan di buatkan video biar pelan2 merakitnya sabar akan hadir entar.. hehe